


در دنیای مدرن تولید، جاییکه رقابت بر سر کسری از ثانیه و دقت در حد میکرون است، ربات چهار محوره (Four-Axis Robot)، ستارهای پنهان است که با سادگی، ثبات و سرعت بینظیرش، بسیاری از خطوط تولید جهان را متحول کرده است. این ماشین هوشمند، نه یک ربات پرپیچوخم همهکاره، بلکه یک متخصص تمامعیار است: استادِ انجام حرکات تکراری، جابهجاییهای سریع افقی و عمودی و چرخاندن دقیق قطعات!
این مقاله، درک شما را از ربات چهار محوره دگرگون خواهد کرد. ما نهتنها به معماری حیرتآور هر یک از چهار محور خواهیم پرداخت، بلکه خواهیم دید که چگونه رباتهای SCARA، رباتهای دلتا فوقسریع و مدلهای مفصلی، هر یک با ویژگیهای منحصربهفرد خود، در صنایع مختلف از مونتاژ الکترونیک تا پالتگذاری سنگین، نقش ایفا میکنند. پس بیایید با هم کشف کنیم که چرا این «ربات چهار محوره»، کلید سرعت، دقت و کارایی پایدار در خط تولید شماست.
ربات چهار محوره چیست؟
ربات چهار محوره یکی از انواع رباتهای مفصلی است که بهواسطه داشتن چهار مفصل یا محور، میتواند در چند جهت مختلف حرکت کند. این نوع رباتها دارای چهار درجه آزادی هستند؛ به این معنی که در سه جهت اصلی (بالا و پایین، چپ و راست، جلو و عقب) حرکت میکنند و همچنین توانایی چرخش دارند. این ترکیب حرکتی باعث میشود بتوانند بسیاری از وظایف صنعتی را با دقت بالا انجام دهند.

پیکربندی ربات 4 محوره چگونه است؟
این رباتها بر اساس ساختار مفصلی خود عمل میکنند و از چهار محور مستقل و قابلکنترل تشکیل شدهاند که هر کدام نقش مشخصی در حرکت کلی بازوی ربات دارند. برای اینکه درک بهتری از نحوه عملکرد این رباتها پیدا کنید، به بررسی نقش هر محور میپردازیم:
| نام محور | بخش ربات | وظیفه اصلی | سهم در عملکرد کلی ربات |
| محور J1 | پایه (Base) | این محور دوران پایه اصلی ربات را کنترل میکند که معمولا تا ۱۸۰ درجه است. | به ربات این امکان را میدهد تا موقعیتیابی اجسام را در امتداد یک خط انجام دهد و حرکت افقی داشته باشد. |
| محور J2 | بازوی پایینی (Lower Arm) | این مفصل به پیکربندی پایه ربط پیدا میکند و حرکت بازوی ربات را به جلو و عقب فراهم میسازد. | با کمک این محور، ربات اجازه پیدا میکند تا اجسام را در امتداد محورهای X و Y جابهجا کرده یا آنها را بلند کند. |
| محور J3 | بازوی بالایی (Upper Arm) | مفصلی حیاتی به شمار میآید که بازوهای بالایی و پایینی را به یکدیگر متصل میکند و بازوی بالایی را تحت کنترل خود دارد. | این محور بهصورت چشمگیری دسترسی عمودی (Z) ربات را افزایش میدهد و باعث میشود قطعات در دسترستر قرار گیرند. |
| محور J4 | مچ (Wrist) | این محور وظیفه چرخاندن ابزار انتهایی (End-of-Arm Tooling یا EOAT) را بر عهده میگیرد. | ربات میتواند با استفاده از این چرخش، جهتدهی دقیق اجسام را انجام دهد و آنها را بگرداند. این محور را میتوان معادل محور ششم در رباتهای ششمحوره متداول در نظر گرفت. |
در مجموع، سه محور اول مچ را به نقطه موردنظر میرسانند و محور چهارم وظیفه چرخش و تنظیم جهت ابزار را بر عهده دارد.
اجزا و قطعات ربات 4 محوره
ربات چهار محوره از مجموعهای از قطعات مکانیکی، الکتریکی و کنترلی تشکیل میشود و هماهنگی این قطعات، عملکرد سریع، دقیق و باثبات ربات را امکانپذیر میسازد. برای اینکه بتوانیم عملکرد این ماشین هوشمند را درک کنیم، باید اجزای کلیدی آن را بشناسیم. این اجزا شامل بازوها، محورها، مچ، منبع تغذیه، سیستم کنترل و سنسورها میشود که در ادامه این بخش به توضیح آنها میپردازیم.

۱. ساختار مکانیکی و بازو (Manipulator and Links)
بازوی ربات از قطعاتی صلب و سبک تشکیل شده که به کمک لولاهای چرخشی به یکدیگر متصل شدهاند. طول و طراحی این قطعات، برد ربات و ارتفاع قابلدسترس آن را تعیین میکنند. اگر جنس این قطعات از آلیاژهای مستحکم و سبک باشد، لرزش هنگام شتابگیری کاهش مییابد و دقت افزایش پیدا میکند.
۲. محورها و سیستم درایو (Axes and Drive System)
هر محور توسط یک سرووموتور تغذیه میشود که با کمک چرخدندهها، تسمهها، کابلها و گیربکسها، نیروی لازم را به بازو منتقل میکند. گیربکس باعث افزایش گشتاور و کنترل بهتر سرعت میشود. انتقال نیرو از طریق کوپلینگ یا تسمه بهصورت بدون لقی انجام میشود که تضمینکننده سرعت و دقت تکرارپذیر حرکتهاست.
۳. ابزار انتهایی و مچ (End-of-Arm Tooling – EOAT)
ابزار انتهایی در انتهای بازو قرار میگیرد و وظیفه گرفتن، جابهجایی، چرخاندن و رهاکردن قطعات را دارد. نوع EOAT براساس کاربرد انتخاب میشود: گریپرهای پنوماتیکی پرسرعت، مکندههای خلأ برای سطوح صاف، یا گریپرهای الکتریکی با کنترل دقیق نیرو. این ابزار باید سبک و محکم باشد تا اینرسی پایین و دقت بالا حفظ شود.
۴. سیستم کنترل و اطلاعات (Control and Intelligence)
این اجزا وظیفه دارند برنامهریزی و اجرای دقیق حرکات را انجام دهند:
- کنترلر ربات بهعنوان مغز اصلی آن، برنامهریزی حرکات، هماهنگی بین محورها و اجرای عملیات را انجام میدهد.
- سنسورها نیز بازخورد لازم را برای کنترل دقیق فراهم میکنند.
- انکودرها موقعیت دقیق هر محور را به کنترلر اطلاع میدهند.
- لیمیتسوئیچها از برخورد با انتهای مسیر حرکت جلوگیری میکنند.
- در مدلهای پیشرفتهتر، سنسورهای تصویری و تشخیص محیط هم اضافه میشوند.
۵. منبع تغذیه (Power Supply)
منبع تغذیه، انرژی الکتریکی لازم برای تامین قدرت موتورها، کنترلر و تمامی قطعات ربات را فراهم میآورد. بیشتر رباتهای چهار محوره از برق متناوب (AC) استاندارد استفاده میکنند، اما برخی مدلها میتوانند با باتریهای جریان مستقیم (DC) نیز کار کنند.
معرفی انواع ربات چهار محوره
رباتهای چهار محوره به سه دسته اصلی تقسیم میشوند. پیکربندی هر کدام از این رباتها، سرعت، ظرفیت حمل بار و کاربرد نهایی آنها را تحتتاثیر قرار میدهد.
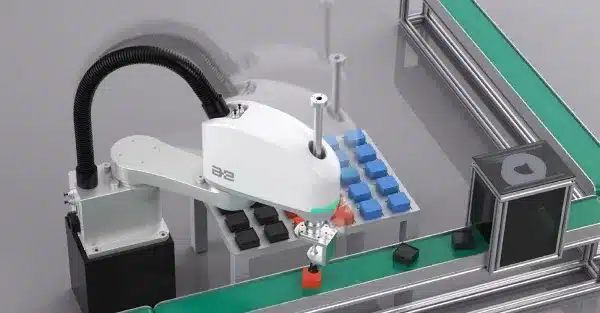
۱. ربات اسکارا (SCARA Robot)
SCARA که مخفف “Selective Compliance Assembly Robot Arm” است، یکی از پرکاربردترین رباتهای چهار محوره محسوب میشود. این ربات دارای دو مفصل چرخشی در یک صفحه، یک مفصل منشوری برای حرکت عمودی و یک محور چرخشی در انتهای بازو (مچ) است.
ربات اسکارا در حرکت افقی سرعت و دقت بالایی دارد و در محور عمودی، سفت و مقاوم باقی میماند. ساختار فشرده و کارایی بالا در حرکتهای افقی، آن را برای مونتاژهای دقیق و بارگذاری ماشینآلات مناسب کرده است. فضای کاری آن بهصورت استوانهایست و در محیطهای تولیدی با فضای محدود عملکرد خوبی دارد.
۲. ربات دلتا (Delta Robot)
ربات دلتا بهخاطر ساختار سبک و سرعت فوقالعادهاش شناخته میشود. این ربات معمولا از سه بازوی موازی تشکیلشده که به یک پایه نصبشده در سقف متصلاند. محور چهارم وظیفه چرخش ابزار انتهایی را بر عهده دارد.
دلتا در عملیات Pick & Place برای قطعات سبک و در تیراژ بالا عملکرد بینظیری دارد. محدوده حرکتی عمودی آن محدود است، اما در صنایع غذایی، دارویی و بستهبندی بهخوبی جا افتاده است. همچنین بهدلیل نصب سقفی، فضای کاری سطح زمین را اشغال نمیکند.
۳. ربات مفصلی (Articulated Robot)
ربات مفصلی چهار محوره، ساختاری شبیه به بازوی انسان دارد و روی زمین یا پایه نصب میشود. این رباتها معمولا برای حمل قطعات سنگین، پالتگذاری و کاربردهایی با نیاز به ثبات بالا بهکار میروند. در مقایسه با اسکارا و دلتا، ظرفیت باربری و برد دسترسی بالاتری دارند. این رباتها با وجود فقط یک محور چرخش در مچ، میتوانند بهراحتی وظایف پالتگذاری را انجام دهند.
کاربردهای ربات چهار محوره چیست؟
رباتهای چهار محوره اغلب برای وظایفی که در آنها کار تکراری با دقت بالا، سرعت بالا و جهتدهی محدود اما دقیق موردنیاز است، انتخابی ایدهآل و مقرونبهصرفه محسوب میشوند. در ادامه این کاربردها را بررسی خواهیم کرد.

۱. جابهجایی مواد و عملیات بردار و بگذار (Material Handling & Pick-and-Place)
این رباتها بهطور گستردهای برای انتقال سریع قطعات میان ایستگاههای کاری یا روی خطوط تولید استفاده میشوند. وظایفی مانند برداشتن قطعات از نوار نقاله، جابهجایی آنها میان مراحل مختلف تولید، چیدن در فیکسچرها یا سینیهای مخصوص و حتی بارگذاری و تخلیه دستگاهها بهراحتی توسط این رباتها انجام میشود.
۲. بستهبندی، چیدمان و پالتگذاری (Packaging and Palletizing)
در انتهای خطوط تولید، رباتهای چهار محوره نقش مهمی در چیدن جعبهها، کارتنها یا کیسهها روی پالت ایفا میکنند. محور چهارم به آنها امکان میدهد تا قطعه را در جهت مناسب بچرخانند و برچسبها یا علائم بستهبندی همیشه رو به بیرون باشد. این ویژگی برای جلوگیری از آسیب به محصولات و مرتبسازی یکنواخت بسیار حیاتیست. کاربرد آنها در صنایع غذایی، دارویی و نوشیدنی بسیار رایج است.
۳. مونتاژ و ساخت قطعات (Assembly and Manufacturing)
در صنایع الکترونیک، این رباتها میتوانند اجزای ریز مانند تراشهها یا قطعات روی برد مدار را با دقت بالا و در زاویه مناسب نصب کنند. در صنایع خودروسازی نیز برای انتقال قطعات و انجام مونتاژهای نیمهدقیق مکانیکی استفاده میشوند. سرعت، دقت و تکرارپذیری بالا، این رباتها را برای فرآیندهای مونتاژ ایدهآل کرده است.
۴. پردازش، بازرسی و کنترل کیفیت (Processing and Quality Control)
رباتهای چهار محوره با بهرهگیری از دوربینها و سنسورهای مختلف، در فرآیندهای کنترل کیفیت و بازرسی کاربرد فراوانی دارند. آنها میتوانند قطعه را بچرخانند تا از زوایای مختلف بررسی شود. کاربردهایی مانند بازرسی نوری، اندازهگیری ابعاد، تست عملکردی، خواندن بارکد و OCR با این رباتها قابل انجام است. همچنین در فرآیندهایی مانند پولیش، برادهبرداری، پاشش رنگ یا اسپری مواد، بهخوبی عمل میکنند.
بررسی مزایا و محدودیتهای رباتهای چهار محوره
شاید مزایا و محدودیتهای ربات چهار محوره بهدلیل طراحی مکانیکی خاص و تعداد محورهای کمتر در مقایسه با رباتهای ششمحوره، برای برخی کاربردها یک گزینه ایدهآل و اقتصادی باشد، اما برای کارهای پیچیده مناسب نباشد. در اینجا برخی از محدودیتها و مزایای رباتهای چهار محوره را بهطور خلاصه بررسی کردهایم:
| مزایا | محدودیتها |
| سرعت و قابلیت اطمینان بالا: برای کارهای تکراری (مانند برداشتن و گذاشتن) عالی هستند. | محدودیت حرکتی: حرکات آنها نسبت به رباتهای ششمحوره خطیتر و انعطافپذیری کمتری دارند. |
| هزینه کمتر: راهاندازی و نگهداری آنها سادهتر و ارزانتر از رباتهای پیچیدهتر است. | نامناسب برای کارهای پیچیده: برای فرآیندهای مسیرمحور مانند جوشکاری چندمحوره، سنگزنی پیچیده یا دنبالکردن سطحهای آزاد مناسب نیستند. |
| ثبات و ظرفیت حمل بیشتر: ساختار صلبتر، ثبات بالاتری را فراهم میکند و میتواند بارهای سنگینتری را جابهجا کند. | پایه ثابت: برخلاف رباتهای متحرک، پایه ثابتی دارند و برای وظایف تکراری در یک ناحیه محدود بهترین عملکرد را دارند. |
| جهتدهی کافی: چرخش مچ (محور چهارم) بدون نیاز به پیچیدگی رباتهای پیشرفته، امکان تنظیم زاویه قطعه را فراهم میکند. | حساسیت به اینرسی EOAT: اگر ابزار انتهایی سنگین باشد، میتواند باعث افزایش لرزش و کاهش دقت شود. |
جمعبندی
ربات چهار محوره بهدلیل ساختار ساده، سرعت بالا، دقت مناسب و قیمت اقتصادی، گزینهای ایدهآل برای بسیاری از کاربردهای صنعتی بهویژه در خطوط مونتاژ، بستهبندی و جابهجایی قطعات است. این رباتها به مدیران تولید، مهندسان اتوماسیون و کارشناسان خرید صنعتی کمک میکنند تا با انتخابی هوشمندانه، بازدهی تولید را افزایش داده و هزینههای مجموعه خود را کاهش دهند.
منابع:
Key Features and Applications of 4-Axis Robotic Arms