


قبل از اینکه برای خرید یا طراحی یک ربات صنعتی تصمیم بگیرید، باید بدانید پیکربندی رباتیک دقیقاً چیست و چرا اینقدر اهمیت دارد. خیلی از مشکلات مثل دقت پایین، سرعت کمتر از انتظار یا حتی استهلاک زودهنگام رباتها، از انتخاب اشتباه پیکربندی شروع میشود. هر پیکربندی ویژگیهای خاص خودش را دارد: یکی سریعتر است، یکی دقیقتر و یکی انعطافپذیرتر. در این صفحه از سایت تیاسروبوت با انواع پیکربندی رباتها آشنا میشویم تا بتوانید انتخاب هوشمندانهتری داشته باشید.
آشنایی با مفاهیم پیکربندی رباتیک
قبل از اینکه وارد جزئیات انواع رباتها بشویم، بهتر است اول چند مفهوم مهم را با هم مرور کنیم تا بدانیم پیکربندی ربات از چه چیزی تشکیل شده است.
1. مفصلها یا Joints
مفصل همان جاییست که ربات حرکت میکند، درست مثل زانو یا آرنج دست. رباتها معمولا از دو نوع مفصل استفاده میکنند.
مفصل دورانی (Revolute)
این مفصل میچرخد، درست مثل مفصل شانه. رباتهایی که از این مدل مفصل استفاده میکنند (مثل رباتهای بندبند (Articulated) و اسکارا) بسیار سریع و منعطف هستند، اما ممکن است دقت و صلبیتشان کمتر باشد.
مفصل کشویی یا منشوری (Prismatic)
مفصل کشویی بهجای چرخش، بهصورت خطی حرکت میکند، مثل کشویی که بیرون و داخل میرود. مفصلهای منشوری معمولاً خیلی دقیق و محکم هستند اما سرعتشان کمتر است.
انتخاب نوع مفصل، مستقیماً روی سرعت، دقت، صلبیت و حتی هزینه نگهداری ربات در خط تولید شما اثر میگذارد.
2. سیستم محرک یا Power Source
مفصلها خودشان حرکت نمیکنند و حتما یک چیزی باید آنها را به حرکت در بیاورد. اینجاست که محرک یا Actuator وارد کار میشود. محرکها سه نوع اصلی دارند:
-
الکتریکی (Electric)
رایجترین و سادهترین نوع محرک است. در محرک الکتریکی معمولاً از موتورهای سروو (AC Servo) استفاده میشود که دقیق و کمهزینه هستند و راحتتر کنترل میشوند.
-
پنوماتیک (بادی)
محرک پنوماتیک با فشار هوا کار میکند. این محرک برای حرکتهای سریع مناسب است اما دقت بالایی ندارد.
-
هیدرولیک (روغنی)
محرک هیدرولیک با فشار روغن کار میکند و برای کارهایی که نیاز به قدرت و صلبیت زیاد دارند، استفاده میشود. مثلا در رباتهایی که باید چیز سنگینی را با دقت جابهجا کنند.
ترکیب مفصل و محرک = تعیین نوع پیکربندی
وقتی بدانیم چه نوع مفصل و چه نوع محرکی داریم، میتوانیم بفهمیم که ساختار کلی ربات یا همان پیکربندی ربات به چه شکل است.
| پیکربندی | نوع مفصلها | نوع محرک رایج |
| کارتزین | ۳ مفصل کشویی | الکتریکی |
| بندبند | همه دورانی | الکتریکی یا گاهی هیدرولیک |
| اسکارا | ترکیب دورانی و کشویی | الکتریکی |
| کروی | دورانی+کشویی | هیدرولیک یا پنوماتیک |
| دلتا | چند بازوی موازی چرخشی | الکتریکی |

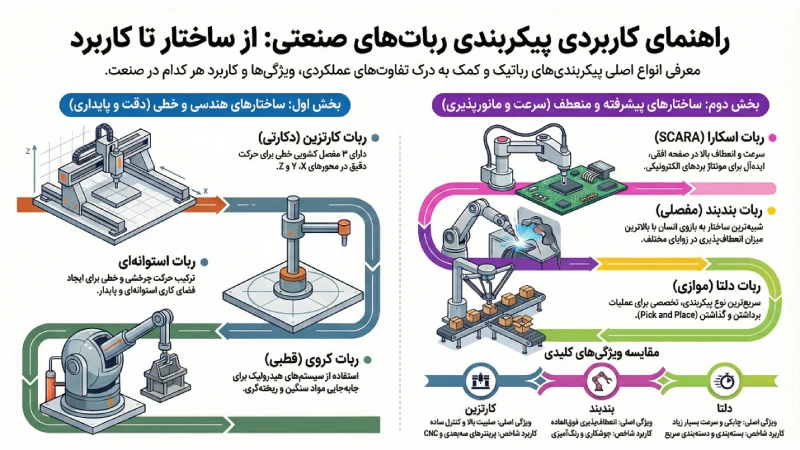
انواع پیکربندی رباتیک
حالا که با مفصلها و محرکها آشنا شدهایم، وقت آن است که به اصل موضوع یعنی انواع پیکر بندی رباتیک بپردازیم. اینکه ربات چه حرکاتی را انجام دهد، چقدر فضا اشغال کند یا چقدر دقیق باشد، تمام این موارد به نوع پیکربندی بستگی دارد. در جدول زیر انواع رباتها بر اساس پیکربندی را با هم بررسی خواهیم کرد.
| نام ربات | نحوه عملکرد | ویژگیها | کاربردها |
| ربات کارتزین (Cartesian) | این رباتها ۳ مفصل کشویی دارند که بهصورت خطی در جهت محورهای X، Y و Z حرکت میکنند. | · حرکت مستقیم و دقیق
· صلبیت بالا · کنترل ساده |
· ماشینهای CNC
· پرینترهای سهبعدی · دستگاههای اندازهگیری مختصات (CMM) |
| ربات استوانهای (Cylindrical) | یک ستون عمودی دارد که به دور خود میچرخد و بازویی دارد که میتواند بالا/پایین و داخل/بیرون برود. | · ترکیب حرکت چرخشی و خطی
· فضای کاری به شکل استوانه · نسبتاً ساده و پایدار |
· مونتاژ قطعات
· جابهجایی ابزار · جوشکاری نقطهای |
| ربات کروی یا قطبی (Spherical / Polar) | این ربات یک بازوی کشویی دارد، همراه با یک پایه چرخان و یک مفصل که بالا و پایین میرود. | · فضای کاری کروی شکل دارد.
· معمولاً از سیستمهای هیدرولیک یا پنوماتیک برای صلبیت بالا استفاده میکند. · کنترل آن کمی سختتر از بقیه است. |
· ریختهگری
· قالبگیری تزریقی · جابهجایی مواد سنگین |
| ربات اسکارا (SCARA) | · ترکیبی از مفصلهای دورانی و کشویی را دارد.
· در جهت XY خیلی سریع و منعطف است. · در محور Z محکم و دقیق عمل میکند. |
· سرعت بالا در صفحه افقی
· دقت خوب در محور عمودی · ایدهآل برای کارهای مونتاژی |
· نصب قطعات الکترونیکی روی برد (PCB)
· صنایع زیستپزشکی · خطوط مونتاژ سریع |
| ربات بندبند یا مفصلی (Articulated) | ساختار آن مثل بازوی انسان است. شانه، آرنج و مچ دارد و مفصلهای آن همگی چرخشی هستند. | · انعطافپذیری بالا
· میتواند از زوایای مختلف به نقطه موردنظر برسد. · صلبیت آن کمتر از مدلهای خطیست. |
· جوشکاری
· رنگآمیزی · بستهبندی · جابهجایی مواد |
| ربات دلتا یا موازی (Delta / Parallel) | این مدل چند بازو دارد که به یک پایه مرکزی متصل هستند و بهصورت موازی با هم کار میکنند. | · سریعترین نوع پیکربندی
· چابکی بسیار بالا · دقت مناسب در کارهای سبک |
· بستهبندی سریع
· دستهبندی کالا · برداشتن و گذاشتن (Pick and Place) |
چطور مناسبترین پیکربندی رباتیک را انتخاب کنیم؟
جواب این سوال به چند معیار مهم بستگی دارد که در ادامه آنها را توضیح خواهیم داد.
1. هدفتان چیست؟
اول از همه باید بدانید که ربات دقیقا قرار است چه کاری برایتان انجام دهد.
| نوع عملیات | پیکربندی مناسب |
| · دقت بالا
· اندازهگیری · CNC |
کارتزین |
| · مونتاژ سریع و سبک | اسکارا |
| · رنگآمیزی
· جوشکاری · حرکت انعطافپذیر |
بندبند (مفصلی) |
| · دستهبندی
· بستهبندی سریع |
دلتا |
| · جابهجایی سنگین یا خاص | کروی یا استوانهای |
2. دقت و صلبیت چقدر مهم است؟
اگر ربات باید کار خیلی دقیقی انجام دهد (مثلاً اندازهگیری یا سوراخکاری)، بهتر است سراغ پیکربندیهایی بروید که مفصلهای کشویی دارند. رباتهای کارتزین یا بخش Z رباتهای اسکارا در این بخش درخشانند.
3. سرعت عملکرد چقدر اهمیت دارد؟
بعضی کارها مثل مونتاژ الکترونیکی یا دستهبندی محصول نیاز به سرعت بالا دارند. در این موارد، پیکربندیهایی مثل دلتا یا اسکارا خیلی خوب جواب میدهند.

4. قرار است ربات چقدر بار حمل کند؟
هر ربات یک ظرفیت مشخص برای تحمل وزن ابزار یا قطعات دارد. اگر وزن ابزار یا قطعه زیاد باشد، باید پیکربندیای را انتخاب کنید که توان تحمل آن را داشته باشد و گرنه هم دقت ربات کم میشود و هم موتورها زود خراب میشوند.
جالب است بدانید که وزن زیاد خود ربات الزاما به معنی قدرت بیشتر آن نیست.
5. شرایط فضای کاری و محل نصب ربات چطور است؟
بعضی رباتها مثل کارتزین یا استوانهای فضای جعبهای یا استوانهای را پوشش میدهند. اما در شرایطی که محدودیت فضا داریم، مثلا در خطوط مونتاژ فشرده یا اتاقهای جراحی، بهتر است از رباتهایی استفاده کنیم که قابلیت نصب روی سقف یا دیوار را دارند.
6. آیا نیاز به کنترل ابزار یا سنسور خاصی دارید؟
اگر بخواهید به رباتتان ابزار خاص، سنسور یا دوربین وصل کنید، باید مطمئن شوید که سیستم کنترلی و ورودی و خروجیهای آن، این امکان را دارند.
7. نگهداری و ایمنی ربات چقدر برایتان مهم است؟
بعضی پیکربندیها قطعات متحرک کمتر یا ساختار سادهتری دارند و نگهداری آنها راحتتر است، مثل ربات کارتزین. از طرف دیگر، ایمنی خیلی مهم است چون رباتها سنگین هستند و ممکن است به آدمها آسیب برسانند، پس باید به محدوده حرکتی، سرعت و تنظیمات ربات هم توجه کرد.
جمعبندی
همانطور که متوجه شدید انتخاب پیکربندی رباتیک، یک تصمیم ساده نیست. شما باید بدانید ربات قرار است چه کاری را انجام دهد، چقدر دقیق باشد، چه باری را حمل کند، کجا نصب شود و حتی با چه ابزارهایی در ارتباط باشد.
ما در تیاسروبوت در کنارتان هستیم تا بتوانید این مسیر را هوشمندانهتر و مطمئنتر جلو بروید. اگر هنوز شک دارید یا میخواهید برای یک پروژه خاص انتخاب کنید، میتوانید برای دریافت مشاوره رایگان، از طریق شماره زیر با کارشناسان ما در تماس باشید. فراموش نکنید که انتخاب درست، نیمی از مسیر موفقیت است.